|
|||||||||
|
|||||||||
| ||||||||||||
En este número les ofrecemos la segunda parte de un útil trabajo, desarrollado por uno de los alumnos del Politécnico, habitual colaborador de esta revista, con el que intenta dar información precisa a nuestros lectores sobre los motores "paso a paso". Encontrarán también información adicional, sobre temas de docencia e investigación, en nuestra sección de RECORTES. Asimismo queremos llamar su atención sobre el esquema del método de publicación que nos envía Benito Fraile. Estuvimos tentados de incluirlo en las páginas de humor, pero tras reflexionar sobre su contenido, creímos más conveniente incluirlo en esta sección. Opinen ustedes. El método infalible para publicarPor Benito Fraile. Profesor Titular del área de Bilogía Celular. Universidad de Alcalá
Volver al principio
Motores paso a paso, introducción a su funcionamiento y control en lazo abiertoPor Arturo Pérez París (Alumno de la Escuela Politécnica. Universidad de Alcalá) SEGUNDA PARTE: DEL CONTROLADOR DE MOTORES PASO A PASO L297.
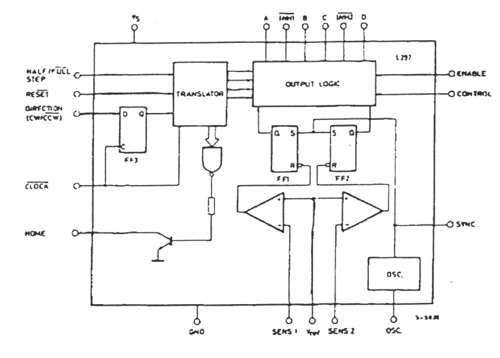
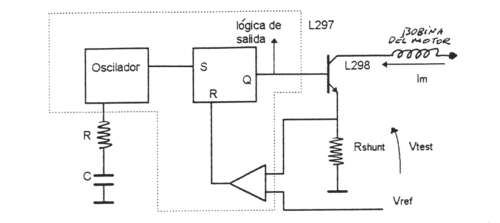
Este circuito es capaz de generar 4 u 8 códigos, según el modo de funcionamiento que preseleccionemos (paso entero, con 1 o 2 fases activas, o medio paso). Además dispone de un circuito de PWM de chopeado que realizará el control de la corriente que fluye por el motor al funcionar, cuya frecuencia de corte podrá ser definida por el usuario. Internamente y de forma esquemática, este chip será:
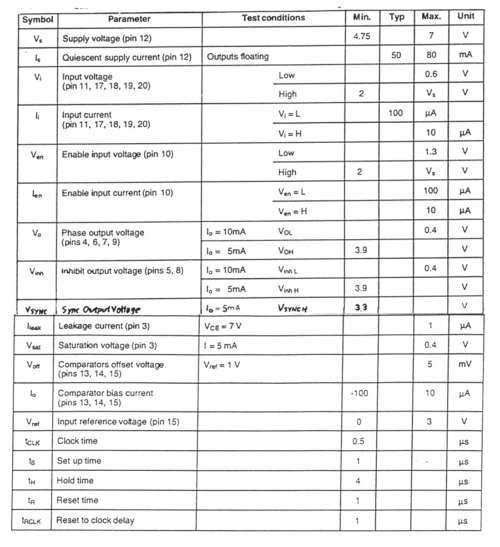
Debido a su arquitectura, este componente sólo necesita que le proporcionemos, además de la alimentación, una seńal de reloj con la que enviará los códigos al puente en H (L298) y de ahí al motor , la dirección de giro y las seńales de control diversas (inicialización, habilitación, etc). Las características eléctricas de este circuito se detallan en la siguiente tabla:
Este chip se usa normalmente con puentes en H como el L298 para las actividades de control en lazo abierto de motores paso a paso. En realidad realiza una doble función el L297, a saber:
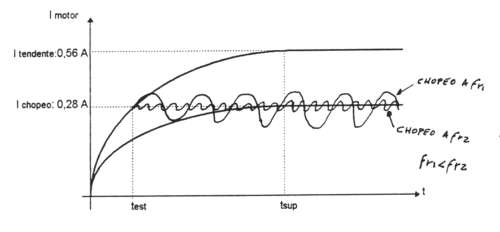
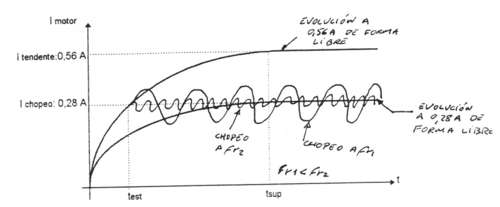
Como se aprecia en la gráfica, básicamente el chopeado consiste en aumentar la tensión de alimentación del motor para que éste alcance la corriente de regulación (Ireg) lo más rápidamente posible. Una vez alcanzada, se cortará y se conectará de forma que se mantenga ese valor de la corriente. Si no se empleara este método los tiempos de reacción serían enormes. Para cada bobinado el circuito a implementar sería:
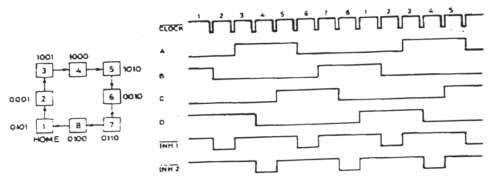
Mediante Vref y calculando adecuadamente Rshunt controlaremos la corriente Im que circulará por el motor, así haciendo: Vtest = Vref Im = Imax que es la que circulará por el motor (es función de si usamos 1 ó 2 fases del motor). Rtest = Vtest / Im Ptotal del motor -> Pmax = R.Im donde R es la resistencia que presenta cada devanado En función de las fases activas: 1 fase -> Im=(Pmax/R)1/2 2 fases -> Im=((Pmax/2)/R)1/2 Siendo así la justificación teórica del cálculo de lo que en los esquemas se denomina Rsense o para nosotros la Rshunt donde verificamos el valor de la corriente que circula por los devanados del motor para su regulación posterior. En dos de las diferentes formas de trabajo con el motor (paso completo con una o dos fases activas y medio paso) se generan las seńales INH1* e INH2* por el L297. Éstas se conectarán directamente al L298, obviamente a los correspondientes pines (6 y 11), con el fin de deshabilitar las correspondientes secciones del puente en H (dejarlos en alta impedancia) y con ello permitir una rápida circulación de la Im de las bobinas del motor cuando están desenergetizadas. El pin de CONTROL determinará que el subcircuito de chopeado actúe sobre las salidas A, B, C y D o las INH1* e INH2* en función de la forma de uso del motor, respecto de la recirculación de la corriente por el puente (de forma rápida o lenta). Los modos de trabajo, como ya se vio, son tres (aunque aquí sólo se han visto dos), donde el avance de las posiciones del motor (códigos emitidos) se hará en el paso del estado bajo al estado alto de la seńal CLOCK*. La primera posición ( o posición índice) es la que hace ABCD=0101, que será al activar el pin de RESET*. El sentido de giro del motor se determinará mediante el pin CW/CCW* (clockwise/counter clockwise) que dará, con un nivel "H" en dicho pin vueltas en sentido horario, y con un nivel "L" vueltas en sentido antihorario. Los modos de funcionamiento del motor se determinarán en función del pin HALF/FULL, así el modo medio paso se ejecutará al poner dicho terminal a nivel "H":
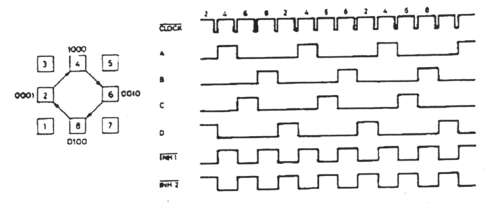
El modo paso completo con 2 fases activas será ejecutable cuando el pin HALF/FULL* esté a nivel "L", quedando las salidas INH1* e INH2* a nivel H:
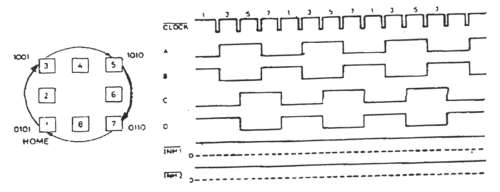
Por último, el modo paso completo con una sola fase activa será ejecutable al llevar a nivel "L" el pin HALF/FULL*, cuando el chip se encuentre generando una posición par (2,4,6 u 8):
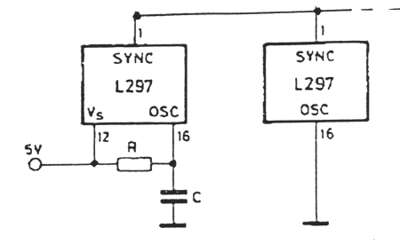
DESCRIPCIÓN PIN A PIN DEL CIRCUITO L297. El pin SYNC es la salida del oscilador de chopeo. Esta salida permitirá sincronizar varios L297 en cascada eliminando el ruido de oscilación por masa y, de paso, ahorrándonos componentes en un sistema en el que usemos varios L297 en cascada, a saber:
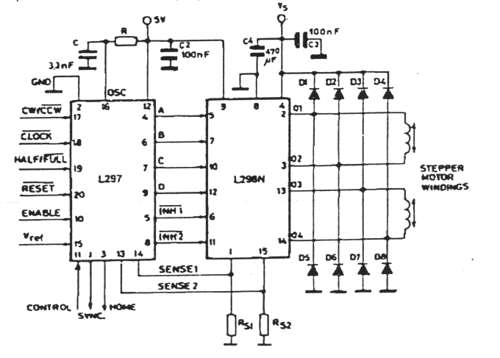
El pin HOME es también una salida (en colector abierto, ya que el transistor dará circuito abierto cuando el pin esté activo) que será activa cuando ABCD=0101. Los pines INH1* e INH2* activas a nivel bajo inhiben el control de un bobinado (A y B para el primero y C y D para el segundo). Cuando usamos el puente en H de forma bipolar, estos pines podrán usarse para asegurar una rápida recirculación de la corriente en los devanados cuando éstos se encuentran en un proceso de desenergetización. También pueden ser usados por el subcircuito de chopeado para regular la corriente por los devanados, siempre y cuando el pin CONTROL se encuentre a nivel bajo. Este pin (CONTROL) es una entrada que define la activación del chopeo. A nivel bajo, el chopeo actúa por INH1* e INH2* como se dijo y cuando el nivel es alto la acción de regulación de corriente por chopeado se hará por los pines ABCD. Los pines SENS1 y SENS2 nos permitirán fijar la referencia que determinará la corriente de paso en los devanados mediante una resistencia de shunt p.e. El pin ENABLE a nivel "H" hará que INH1*,INH2*, A, B, C y D permanezcan a nivel bajo, o sea deshabilita el L297. El terminal OSC mediante una red RC determinará la frecuencia de chopeo mediante la relación: fr=1/(0,69·Ro·C) El pin CW/CCW es una entrada con la que determinaremos un sentido dextrógiro si se pone a nivel "H" o levógiro si lo ponemos a nivel "L". El pin CLOCK* determinará la velocidad con la que daremos los pasos en función de la frecuencia de entrada de la seńal que le introducimos. El pin HALF/FULL determinará el modo de trabajo del motor; así si está a nivel "H" trabajará a medio paso, y si está a nivel "L", lo hará a paso completo, seleccionándose si es a 1 ó 2 fases activas en función de si estamos (en medio paso) en posición par o impar (en el cambio a paso completo). Por último, el pin RESET puesto a nivel "L" repondrá en los devanados la posición inicial ABCD=0101 (home). El circuito que montaremos será tal que permita controlar un motor en modo bipolar, a saber:
Como preliminares partiremos de los siguientes datos de partida:
El diseńo del sistema vendrá dado por: Del motor:
Del L297:
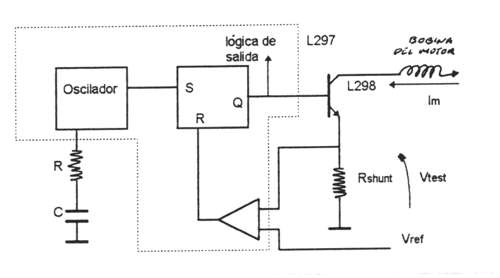
El efecto de variar la frecuencia del oscilador de chopeo es el de regular fehacientemente la corriente que entregaremos a las bobinas del motor, con la velocidad de circulación hacia ellas superior a la que por si mismas, por t , alcanzarían. Veamos el circuito equivalente que interviene:
Si Vtest >= Vref resetearemos el flip-flop, cortando el transistor. A la par, la seńal cuadrada del generador seteará el FF saturando el transistor, así se tendrá:
Aumentar la frecuencia de chopeo supone mejorar la regulación de la corriente por los bobinados del motor, en principio; mas en la práctica se observa que a partir de una frecuencia deja de regular adecuadamente. Fijando Vref=1v, C=3.3nF obtenemos la siguiente tabla:
Este fenómeno se produce al aumentar la frecuencia de chopo en exceso, haciendo que no le de tiempo al transistor de potencia del L298 a conmutar. De hecho, en sus hojas características nos dan como frecuencia máxima de conmutación de 25 a 40 Khz. La variación de Vref conlleva "per se" el control del nivel de tensión en Rshunt y con ello la corriente que circulará por los devanados del motor (o sea , valor de Ireg fijado anteriormente ). Con esto y fijando una frecuencia de chopeo adecuada , con Vref=1v de 18Khz (condiciones iniciales de diseńo) se comenzó la experiencia de variar Vref desde 0 hasta 2v:
Lo que aquí se refleja es Vref < Vtest -> R=L -> Q=L -> trt cortado ya que sobrepasa el motor la consigna: para 0v y 0.25v no hay movimiento, pues en el Rshunt se alcanzan rápidamente estos valores y no le da tiempo a la bobina a activarse. A partir de 0.5v y 0.75v ya hay movimiento con más o menos dificultad (se escuchan incluso chirridos en el motor) y vemos que el chopeo entra en acción, ya que le da tiempo a la corriente a circular por los devanados y con ello, llegar y sobrepasar la consigna dando movimientos torpes al rotor. Para 1v el funcionamiento es el normal y para tensiones mayores (1.5 y 2v) la situación se invierte, o sea: Vref>Vtest -> R=H -> Q=H Lo que viene a decirle al motor que puede consumir más corriente (no como para 0, 0.25, 0.5, 0.75, donde obligábamos al motor a consumir corrientes ridículas y para los 2 primeros casos insuficiente para producir movimiento) , apreciándose cómo interviene cada vez menos el chopeo, pues no hace falta regular excesivamente la corriente por los devanados. De toda esta experiencia, también nos damos cuenta de que los terminales INH1* y INH2* , al ser activadas (a nivel bajo) , inhiben el chopeado del bobinado por los pines A,B,C y D , ya que éste se realizará a través de los mencionados INH1* e INH2*.en el puente en H , que es el L298 , haciendo que se produzca una recirculación rápida de las corrientes residuales en los devanados por medio de los diodos hacia la fuente de alimentación . Si no conectamos INH1* e INH2 del L297 al L298, el chopeado se realizará por medio de A,B,C y D, realizándose la recirculación de corrientes residuales de los bobinados de forma lenta; o sea, por disipación en el propio puente. Para hacer que esto sea posible, INH1* e INH2* del L297 se dejarán al aire y los del L298 los llevaremos a +5v. Todas las medidas aquí realizadas están sujetas a errores, debidos en parte a la instrumentación (variaciones que introducen en el circuito a la hora de realizar las medidas). Estas en principio podrán considerarse despreciables, ya que los más importantes provienen de los ruidos ambientales tales como los fluorescentes, otros motores, capacidades parásitas, etc. susceptibles de ser corregidos mediante buenos filtros en la alimentación del circuito y una buena implementación en la placa de pistas de masa que intenten emular el comportamiento de la caja de Faraday, evitándose de la mejor forma posible, la intrusión de seńales indeseables que impedirían la buena marcha de nuestro sistema. Otros errores son los derivados de la mala toma de datos a la hora de medir. Estos se subsanan con la repetición de los mismos, su posterior verificación y aproximación, si esto fuese necesario por existencia de discrepancias ostensibles entre las diferentes tomas. Por último me gustaría hacer mención de las grandes posibilidades que ofrecen este tipo de circuiterias. Desde las mas sencillas como podría ser un reloj analógico, pasando por maquinaria de uso gráfico (léase trazadores, impresoras o aerográfos automáticos) y terminando por aplicaciones robóticas tanto industriales como domésticas, médicas, militares, etc., debido sobre todo a la precisión en su control sobre las capacidades ofrecidas por otros tipos de motores o actuadores de movimiento. Sólo reseńar sus limitaciones con respecto a la frecuencia máxima de las seńales que les podemos aplicar, muy bajas aún, que sobrepasadas, provocan su colapso o mal funcionamiento. Además también se aprecian excesivos calentamientos aun estando parados. Todos estos son, intuyo, defectos que podrán subsanarse con el avance de la tecnología al cabo del tiempo. Bien, hasta aquí la segunda parte de este artículo. Espero encontrarles en la siguiente, donde abordaremos nuevas cuestiones sobre el control en lazo abierto de motores paso a paso. Hasta entonces, y siguiendo la tradición que me he marcado en esta revista: Espero que el presente escrito haya resultado del gusto del lector; si no hubiera sido así, desde aquí hago propósito de enmienda para que el próximo salga mejor. Si por el contrario le gustó (al más puro estilo "shakespeariano"), quedemos como amigos y volvamos a encontrarnos dónde a la diosa fortuna más la complazca. BIBLIOGRAFÍA Ref. 3: Hojas de Características SGS Volver al principio del artículo Volver al principio
RECORTESLa Universidad, o será investigadora o no seráJOAN J. GUINOVART. Diario "El País" ( 31-05-00) La sociedad espańola no ha asimilado la idea de que la investigación es consustancial a la Universidad. El reparto de competencias entre los nuevos ministerios de Educación y Cultura y de Ciencia y Tecnología puede representar una nueva barrera para esta imprescindible afirmación, de modo que puede contribuir a desfigurar todavía más la visión de la Universidad como centro docente e investigador. Nadie parece darse cuenta de la importancia capital que para el alumnado tiene estar expuesto a la influencia positiva de profesores que son investigadores activos. Sin investigación, la Universidad no es más que un instituto superior que se limita a la transmisión del saber, frecuentemente de forma poco crítica y sin que los alumnos lleguen a aprehender cómo se generaron los conocimientos. De esa manera se enseńa ciencia "revelada" y no "descubierta". Cuando la ciencia se transmite así no se diferencia mucho de la forma en que en la Edad Media se enseńaba medicina usando los textos de Hipócrates o Galeno pero sin hacer ninguna disección. Es imprescindible recoger en la nueva LRU (Ley de Reforma Universitaria) que la investigación es parte intrínseca de las tareas de un profesor universitario y tomar medidas para favorecer la actividad investigadora asegurando que ésta reporte beneficios claros a los profesores que la ejercen y también a sus centros. Sin embargo, la separación en dos ministerios de las dos tareas básicas de la Universidad, docencia e investigación, no facilita, de entrada, la toma de este tipo de decisiones. La falta de percepción de las universidades como centros de investigación tiene consecuencias graves. La peor es que los rendimientos en investigación no están contemplados en los baremos que se utilizan para calcular la subvención que reciben las universidades de los gobiernos de los que dependen. El presupuesto está basado esencialmente en el número de alumnos y en el de docentes. El resultado es que las universidades no reciben directamente dinero para llevar a cabo investigación, ni, lo que es más grave, se benefician de forma directa (es decir, con mayores ingresos netos) de la investigación que sus profesores llevan a cabo. Más bien es al contrario, y de hecho les cuesta dinero, como ha seńalado recientemente el vicerrector de Economía de la Universidad de Barcelona, profesor Enric Canela. La obtención de fondos destinados a la investigación depende de la iniciativa de los profesores, que, si tienen éxito en sus peticiones, perciben unas cantidades finales para desarrollar un proyecto, mientras que la Universidad recibe un 10% del total que no alcanza a cubrir el incremento en los gastos generales (agua, luz, mantenimiento de instalaciones y aparatos, administración) resultantes de la actividad investigadora. La consecuencia de esta situación es que ni la institución ni el profesor se benefician de forma palpable de la investigación que realizan. Por eso para el profesor se convierte en una actividad opcional, completamente dispensable y que se lleva a cabo prácticamente como un capricho. Por las mismas razones, las universidades no sienten ninguna necesidad seria de presionar a sus profesores para que hagan investigación. Se argumentará que se consigue un mayor prestigio, pero en un ambiente tan poco competitivo como el espańol eso se traduce en muy poco o nada. Sin embargo, a pesar de estas circunstancias, son muchos los profesores universitarios que se dedican con el mayor ahínco a la investigación y de ninguna manera se puede permitir que tanto esfuerzo se malogre. Porque, si los dos ministerios -Educación y Cultura y Ciencia y Tecnología- no consiguen aunar sus iniciativas en la dirección de favorecer la investigación en la Universidad, ésta corre el grave peligro de acabar siendo sólo un lugar "donde se dan clases" mientras la creación de nuevos conocimientos se lleva a cabo en otros lugares. En estas circunstancias, alguien debería indicar dónde. Joan J. Guinovart es catedrático de Bioquímica y Biología Molecular de la Universidad de Barcelona. Volver al principio del artículo Volver al principio de recortes Volver al principio
Espańa dedica la mitad que la OCDE a becas universitariasEl 16,5% de las ayudas en otros países son préstamos del Estado JUANJ.GÓMEZ , Madrid (29-05-00) Diario "El País". Las ayudas económicas a universitarios suponen el 10% del presupuesto público espańol para educación superior, menos de la mitad del 21% de media de los países de la Organización para la Cooperación y el Desarrollo Económico (OCDE), según datos de 1997 que ofrece el informe La educación, de un vistazo . Los préstamos del Estado, inexistentes en Espańa, son el 16,5% de las ayudas en otros países. Espańa dedica a ayudas financieras para sus estudiantes universitarios el 0,09% de su producto interior bruto, menos de un tercio de la media en los países de la OCDE (0,29%). Las familias espańolas -a través del pago de matrículas en centros públicos y privados- son las que más proporción del presupuesto total de las universidades asumen, un 21%. En el reparto del gasto público en ayudas por estudiante, sólo México, Portugal y Polonia aparecen por detrás de Espańa. El estudio refleja que la mayor parte de las ayudas son en forma de becas o de préstamos. Los préstamos, una tendencia en alza, tienen la ventaja de que el gasto se recupera y permite ayudar a más estudiantes; pero sus detractores sostienen que son mucho menos atractivos que las becas para los estudiantes con escasos recursos económicos. En 1997 había 11 países (Espańa excluida) que concedían préstamos del Estado a los estudiantes. Estos préstamos suponían de media el 16,5% de toda la ayuda públicas a universitarios en la OCDE. Algunos Gobiernos ofrecen un subsidio indirecto, que consiste en avalar los préstamos privados a los estudiantes. Canadá invierte en estos avales la mitad de su presupuesto. Créditos bancarios El Gobierno espańol no concede préstamos a los universitarios. Algunos bancos y cajas cuentan con créditos diseńados para estudiantes con condiciones flexibles. El Ministerio de Educación ofrece desde hace dos ańos a los estudiantes de último curso (de diplomaturas o licenciaturas) facilidades para solicitar préstamos bancarios de 670.000 pesetas. Son préstamos a bajo interés (el estudiante paga un 1%) que se devuelven en cuatro ańos. La ayuda del ministerio consiste en pagar el 50% de los intereses. Sólo 2.000 estudiantes se han beneficiado hasta ahora de estos préstamos. Las universidades públicas catalanas, mediante un acuerdo alcanzado hace dos cursos con bancos y cajas, permiten a sus alumnos pagar la matrícula en 11 mensualidades, con un interés del 5,25%. También hay centros privados que acuerdan con entidades bancarias préstamos cómodos para sus alumnos. A partir del próximo curso, los alumnos de la Universidad Europea CEES de Madrid podrán pagar hasta el 70% del coste de sus estudios después de terminar la carrera, hasta un máximo de 10 ańos, y verán reducido el interés del préstamo hasta dos puntos en función de sus logros académicos. Volver al principio del artículo Volver al principio de recortes Volver al principio
żCómo será la educación en el futuro?ESTEBAN SERRANO MARUGÁN ( 20-03-00), Diario "El País" Vaya pregunta! Somos capaces de abrir un debate apasionante sobre el futuro de la educación cuando el presente es bastante preocupante. Ordenadores, Internet, libros electrónicos, códigos de barras, programas interactivos educativos, pizarras de cuarzo líquido..., ciencia ficción. Lo que sí son datos reales es que actualmente el 75% de los espańoles no va al teatro nunca, el 92% jamás asistió a un concierto de música clásica y la mitad nunca lee libros. Y nosotros, empeńados en informatizar a diestro y siniestro. ˇCómo somos! Observando el panorama actual, un día cualquiera en un instituto del futuro podría transcurrir así: 1Ş hora. Asignatura de desordenar. "El alumno debe conseguir entender que la realidad no es la pantalla del ordenador". El profesor se esfuerza para convencer a sus muchachos de que las montańas tienen tres dimensiones; que conducir un coche no es jugar al Rally-3000 de la consola; que no hace falta alimentar a los dinosaurios porque ya no existen. En cambio, sí hay que cuidar a los linces y a los osos, y lo que se ve en el cielo por la noche, más allá de las farolas, son estrellas y planetas. 2Ş hora. Asignatura de comunicación con otros seres humanos. "El alumno debe conseguir las habilidades mínimas para hacerse entender por sus semejantes. Diferenciar claramente los códigos de habla con máquinas y con seres humanos". El profesor se esforzará para que sus alumnos hilvanen frases de más de dos palabras: "Por favor, żpuede moverse, que no veo la pizarra?" en vez de "ˇAparta!". "ˇAy!, que me pisas", en vez de "ˇJoer!, ˇquita!". "żPuede repetir?", en vez de "ˇQuéeeeeeeeee!" Es muy importante que los chicos comprendan que el lenguaje empleado en los juegos instalados en sus ordenadores no es, precisamente, el más idóneo para crear un mínimo clima de convivencia. También se estudiarán algunos términos en desuso que conviene recuperar como: por favor, buenos días, gracias, żqué tal estás? 3Ş y 4Ş horas. Asignaturas de corte clásico. Lenguaje, educación física, matemáticas, ciencias naturales, informática, geografía e historia, filosofía, música, dibujo, etcétera. Entre las horas 3Ş y 4Ş habrá un descanso de treinta minutos, en el que permanecerá cerrada la sala de ordenadores. En este recreo se fomentarán chats reales que consisten en chats tipo Internet, pero viendo, incluso tocando, al que dialoga contigo. 5Ş hora. Asignatura de estudio. El alumno dedica esta hora a estudiar la asignatura que quiera. En todo momento habrá profesores de todas las materias a su disposición, además de ordenadores conectados en red, mesas para trabajar en grupo, amplia biblioteca y todos los medios a su alcance. En la pared habrá un cartel que dice: "Aprender requiere esfuerzo". Antes, en épocas pasadas, los alumnos tenían la costumbre de estudiar en sus casas por la tarde. 6Ş hora. Encuentro padres-alumnos. Los padres, me refiero a la madre y al padre, tienen que estar una hora hablando con sus hijos sobre lo que han hecho en el instituto. Los hijos comentarán lo aprendido y los padres deben preguntarles dudas y animarlos. En todo momento, durante este diálogo familiar, las televisiones, ordenadores y radios permanecerán obligatoriamente apagados. żSerá así el futuro de la educación? żPermitirá la sociedad que se continúe esta degradación permanente de la enseńanza, en especial de la enseńanza pública? żVendrá algún Gobierno interesado por la educación? Con ganas de redimirla, con ánimo de prestigiar, aunque sólo sea un poquito, a los profesores. żHabrá políticos preocupados por sus adolescentes? żHabrá algún día ofertas imaginativas para los que no quieren estudiar? La situación es mala, muy mala, y parece que la panacea está en un ordenador, ˇqué ilusos! La solución requiere el esfuerzo de todos. Y en medio de todo este caos se encuentran los alumnos, los más perjudicados. Ellos reflejan el mal comportamiento, la agresividad, el desinterés y todo lo que ven en su ambiente, en sus casas, en su entorno, que muchas veces es del todo inadecuado para tener un mínimo de estabilidad que les haga venir a la escuela con actitud positiva. Pero ˇqué poco puede hacer un profesor en estas condiciones! Políticos, padres y madres, por favor, preocúpense de sus hijos, todos saldremos ganando. żCómo se puede arreglar esta situación? Lo primero es concienciarnos de que todos somos educadores. żSe han fijado cómo educa la televisión con su bombardeo constante? żY nuestros políticos con su hipocresía? żY los futbolistas con sus actitudes chulescas? Lo segundo sería mucho más sencillo. Si la sociedad demanda de los profesores que seamos los únicos responsables de la formación de sus hijos, necesitamos contar con 15 alumnos por aula, institutos con no más de 30 grupos, y un poquito de colaboración de los padres. Así de simple. żPor qué no se hace? Misterio. Hoy por hoy nadie ayuda a los profesores, ni las administraciones, ni los sindicatos, ni los padres, ni los medios de comunicación, nadie. Estamos solos. Esteban Serrano Marugán es profesor de matemáticas del instituto de enseńanza secundaria África, de Fuenlabrada (Madrid). Volver al principio del artículo Volver al principio de recortes Volver al principio |
|